本系列文章为线性系统控制的学习笔记。我们将围绕状态空间方程展开,探讨如何分析和计算动态系统。为了聚焦基础推导与数值计算,本系列主要讨论线性时不变系统和离散时间系统。
线性系统控制 1 ———— 状态空间模型
在分析动态系统时,我们通常会面对一个核心问题:如何用数学语言准确描述物理世界的行为?无论是机械系统中的振动控制,还是电路系统中的信号处理,我们最开始接触的工具往往是微分方程。然而,随着系统复杂度的提升,状态空间表示法逐渐成为了现代控制理论的核心。
1 经典视角:高阶微分方程
微分方程是我们描述物理系统动态特性的直观工具。它通过系统变量及其各阶导数之间的关系,揭示了系统是如何随时间演化的。
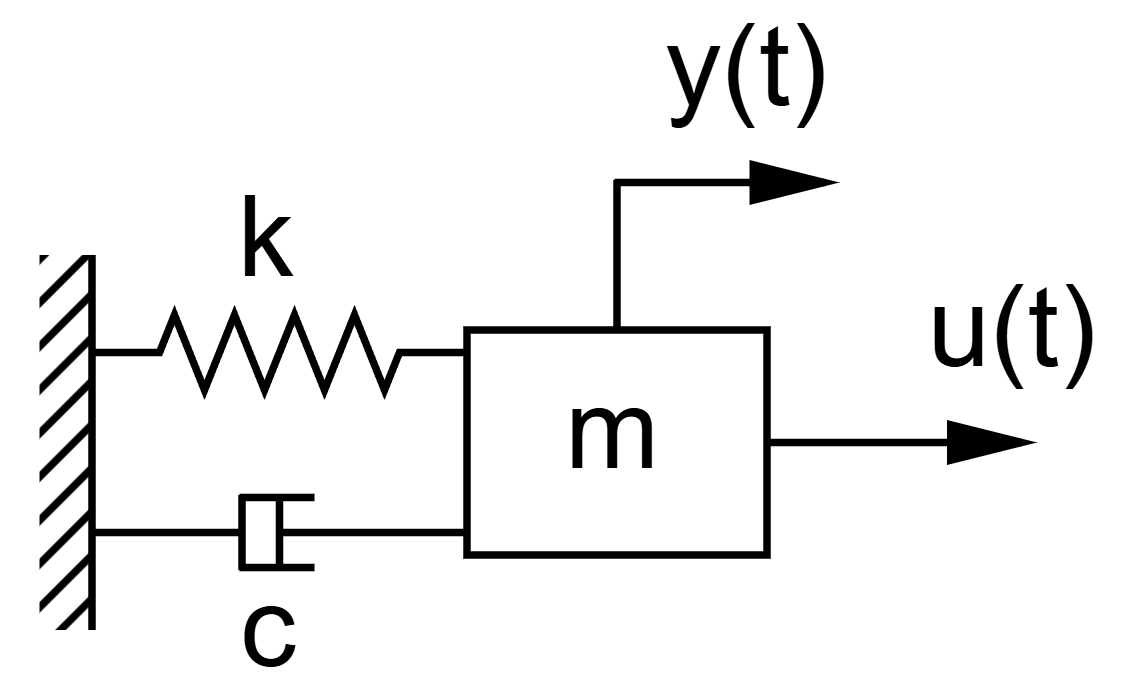
以一个经典的机械系统——质量-弹簧-阻尼系统为例。其示意图如图1所示。
图1 质量-弹簧-阻尼系统示意图
根据牛顿第二定律,我们可以写出如下的二阶常微分方程:
m y ¨ ( t ) + c y ˙ ( t ) + k y ( t ) = u ( t ) m\ddot{y}(t) + c\dot{y}(t) + ky(t) = u(t)
m y ¨ ( t ) + c y ˙ ( t ) + k y ( t ) = u ( t )
其中:
y ( t ) y(t) y ( t )
u ( t ) u(t) u ( t )
m , c , k m, c, k m , c , k
这个系统是一个经典的单输入单输出系统模型,通过微分方程仅仅描述了输入和输出之间的关系,把系统内部作为一个黑盒。
2 现代视角:状态空间模型
为了打破黑盒,现代控制理论引入了状态变量的概念。状态变量是能够完全确定系统未来行为的最小变量集合。状态空间方程将一个 n n n n n n
状态方程: 描述系统内部状态的演化。
x ˙ ( t ) = A x ( t ) + B u ( t ) \dot{\mathbf{x}}(t) = \mathbf{A}\mathbf{x}(t) + \mathbf{B}\mathbf{u}(t)
x ˙ ( t ) = Ax ( t ) + Bu ( t )
输出方程: 描述内部状态与可测量输出之间的关系。
y ( t ) = C x ( t ) + D u ( t ) {\mathbf{y}}(t) = \mathbf{C}\mathbf{x}(t) + \mathbf{D}\mathbf{u}(t)
y ( t ) = Cx ( t ) + Du ( t )
其中:
x ( t ) n × 1 \mathbf{x}(t)_{n \times 1} x ( t ) n × 1 t t t n n n n × 1 n \times 1 n × 1
x ˙ ( t ) n × 1 \dot{\mathbf{x}}(t)_{n \times 1} x ˙ ( t ) n × 1
u ( t ) m × 1 \mathbf{u}(t)_{m \times 1} u ( t ) m × 1 m m m m × 1 m \times 1 m × 1
y ( t ) p × 1 \mathbf{y}(t)_{p \times 1} y ( t ) p × 1 p p p p × 1 p \times 1 p × 1
A n × n \mathbf{A}_{n \times n} A n × n A \mathbf{A} A
B n × m \mathbf{B}_{n \times m} B n × m u ( t ) \mathbf{u}(t) u ( t )
C p × n \mathbf{C}_{p \times n} C p × n y ( t ) \mathbf{y}(t) y ( t )
D p × m \mathbf{D}_{p \times m} D p × m D \mathbf{D} D
3 核心推导:将微分方程转换为状态方程
通过定义新的变量,把高阶导数降为一阶导数。我们依然以上面的二阶系统为例:
m y ¨ + c y ˙ + k y = u m\ddot{y} + c\dot{y} + ky = u
m y ¨ + c y ˙ + k y = u
第一步:定义状态变量
我们将系统的位移和速度定义为状态变量:x 1 = y x_1 = y x 1 = y x 2 = y ˙ x_2 = \dot{y} x 2 = y ˙
状态向量为
x ( t ) = [ x 1 x 2 ] = [ y y ˙ ] \mathbf{x}(t) = \begin{bmatrix} {x}_1 \\ {x}_2 \end{bmatrix} = \begin{bmatrix} {y} \\ \dot{y} \end{bmatrix}
x ( t ) = [ x 1 x 2 ] = [ y y ˙ ]
状态向量的导数为
x ˙ ( t ) = [ x ˙ 1 x ˙ 2 ] = [ y ˙ y ¨ ] \dot{\mathbf{x}}(t) = \begin{bmatrix} \dot{x}_1 \\ \dot{x}_2 \end{bmatrix} = \begin{bmatrix} \dot{y} \\ \ddot{y} \end{bmatrix}
x ˙ ( t ) = [ x ˙ 1 x ˙ 2 ] = [ y ˙ y ¨ ]
第二步:建立一阶方程组
对于状态方程,我们需要知道状态向量的导数与状态和输入向量之间的关系,其中
x ˙ 1 = y ˙ = x 2 \dot{x}_1 = \dot{y} = x_2
x ˙ 1 = y ˙ = x 2
x ˙ 2 = y ¨ = − k m y − c m y ˙ + 1 m u = − k m x 1 − c m x 2 + 1 m u \dot{x}_2 = \ddot{y} = -\frac{k}{m}y - \frac{c}{m}\dot{y} + \frac{1}{m}u = -\frac{k}{m}x_1 - \frac{c}{m}x_2 + \frac{1}{m}u
x ˙ 2 = y ¨ = − m k y − m c y ˙ + m 1 u = − m k x 1 − m c x 2 + m 1 u
第三步:写成矩阵形式
将上述方程组用矩阵表示,就得到了标准的状态空间方程:
[ x ˙ 1 x ˙ 2 ] = [ 0 1 − k m − c m ] [ x 1 x 2 ] + [ 0 1 m ] u \begin{bmatrix} \dot{x}_1 \\ \dot{x}_2 \end{bmatrix} = \begin{bmatrix} 0 & 1 \\ -\frac{k}{m} & -\frac{c}{m} \end{bmatrix} \begin{bmatrix} x_1 \\ x_2 \end{bmatrix} + \begin{bmatrix} 0 \\ \frac{1}{m} \end{bmatrix} u
[ x ˙ 1 x ˙ 2 ] = [ 0 − m k 1 − m c ] [ x 1 x 2 ] + [ 0 m 1 ] u
因为我们的输出是位移 y y y
y = [ 1 0 ] [ x 1 x 2 ] + [ 0 ] u y = \begin{bmatrix} 1 & 0 \end{bmatrix} \begin{bmatrix} x_1 \\ x_2 \end{bmatrix} + [0] u
y = [ 1 0 ] [ x 1 x 2 ] + [ 0 ] u
4 为什么需要使用状态空间方程
这是本篇文章的核心。既然微分方程已经能描述系统,为什么控制工程师和研究人员如此偏爱状态方程?
4.1 方程的求解与计算
经典的传递函数或微分方程处理多输入多输出系统时,由于变量间的耦合,表达式会变得极其冗长和复杂。但在状态空间中,增加输入输出仅仅意味着矩阵 B B B C C C x ˙ = A x + B u \dot{x} = Ax + Bu x ˙ = A x + B u
4.2 系统的内部结构
微分方程只关心输入和输出的宏观表现。状态方程则让我们能够“看透”系统内部。它不仅能帮助我们判断系统是否稳定,还能让我们分析系统的可控性(我们能否通过输入把系统推到任意状态)和可观测性(我们能否仅通过测量输出反推出所有内部状态)。
4.3 微控制器的适用
现代控制系统几乎都是由微控制器运行的。代码是按离散的采样周期运行的,没有真正的“连续时间”。强行把高阶微分方程写成代码,不仅需要复杂的差分近似,还会引入巨大的截断误差。连续状态方程可以利用状态转移矩阵转化为离散时间状态方程,便于我们在底层硬件上编写控制算法。
4.4 现代控制策略的基石
如果我们想在未来应用更高级的控制理论,比如最优控制中的线性二次型调节器、卡尔曼滤波或者状态反馈控制,这些算法全部都是建立在状态空间模型之上的。
5 状态空间方程优势展现
5.1 内部状态
回到之前推导出的标准状态空间方程。
5.1.1 状态方程
[ x ˙ 1 x ˙ 2 ] = [ 0 1 − k m − c m ] [ x 1 x 2 ] + [ 0 1 m ] u \begin{bmatrix} \dot{x}_1 \\ \dot{x}_2 \end{bmatrix} = \begin{bmatrix} 0 & 1 \\ -\frac{k}{m} & -\frac{c}{m} \end{bmatrix} \begin{bmatrix} x_1 \\ x_2 \end{bmatrix} + \begin{bmatrix} 0 \\ \frac{1}{m} \end{bmatrix} u
[ x ˙ 1 x ˙ 2 ] = [ 0 − m k 1 − m c ] [ x 1 x 2 ] + [ 0 m 1 ] u
其中,状态变量 x 1 x_1 x 1 x 2 x_2 x 2
第一行:运动学约束
x ˙ 1 = x 2 \dot{x}_1 = x_2
x ˙ 1 = x 2
表示位移的变化率,等于当前的速度。作为系统矩阵 A \mathbf{A} A B \mathbf{B} B + 0 ⋅ u +0 \cdot u + 0 ⋅ u
第二行:动力学方程
x ˙ 2 = − k m x 1 − c m x 2 + 1 m u \dot{x}_2 = -\frac{k}{m}x_1 - \frac{c }{m}x_2 + \frac{1}{m}u
x ˙ 2 = − m k x 1 − m c x 2 + m 1 u
我们得到牛顿第二定律的表达形式 a = ∑ F / m a = \sum F / m a = ∑ F / m x 2 x_2 x 2 x ˙ 2 \dot{x}_2 x ˙ 2
位置的反馈项 (− k m x 1 -\frac{k}{m}x_1 − m k x 1
速度的阻尼项 (− c m x 2 -\frac{c}{m}x_2 − m c x 2
外部输入项 (+ 1 m u +\frac{1}{m}u + m 1 u
内部演化全貌:输入信号 u u u x ˙ 2 \dot{x}_2 x ˙ 2 x 2 x_2 x 2 x 2 x_2 x 2 x 1 x_1 x 1 x ˙ 2 \dot{x}_2 x ˙ 2
由此形成一个连续的动态闭环:输入 → 加速度 → 速度 → 位移 → 内部力 → 加速度。
5.1.2 输出方程
y = [ 1 0 ] [ x 1 x 2 ] = x 1 \mathbf{y} = \begin{bmatrix} 1 & 0 \end{bmatrix} \begin{bmatrix} x_1 \\ x_2 \end{bmatrix} = x_1
y = [ 1 0 ] [ x 1 x 2 ] = x 1
矩阵 C = [ 1 0 ] \mathbf{C} = \begin{bmatrix} 1 & 0 \end{bmatrix} C = [ 1 0 ] x \mathbf{x} x y = [ 1 0 ] [ x 1 x 2 ] = x 1 \mathbf{y} = \begin{bmatrix} 1 & 0 \end{bmatrix} \begin{bmatrix} x_1 \\ x_2 \end{bmatrix} = x_1 y = [ 1 0 ] [ x 1 x 2 ] = x 1
如果我们只买了一个测速仪(比如多普勒雷达),那么矩阵 C \mathbf{C} C [ 0 1 ] \begin{bmatrix} 0 & 1 \end{bmatrix} [ 0 1 ] y = [ 0 1 ] [ x 1 x 2 ] = x 2 \mathbf{y} = \begin{bmatrix} 0 & 1 \end{bmatrix} \begin{bmatrix} x_1 \\ x_2 \end{bmatrix} = x_2 y = [ 0 1 ] [ x 1 x 2 ] = x 2
如果我们既有位移传感器,又有测速仪,矩阵 C \mathbf{C} C 2 × 2 2 \times 2 2 × 2 [ 1 0 0 1 ] \begin{bmatrix} 1 & 0 \\ 0 & 1 \end{bmatrix} [ 1 0 0 1 ] y \mathbf{y} y
矩阵 C \mathbf{C} C C \mathbf{C} C
矩阵 D \mathbf{D} D u \mathbf{u} u y \mathbf{y} y
y = C x + D u \mathbf{y} = \mathbf{C}\mathbf{x} + \mathbf{\color{red}{D}\mathbf{u}}
y = Cx + D u
为什么大多数物理系统中 D = 0 \mathbf{D} = \mathbf{0} D = 0
想一想我们的质量-弹簧-阻尼系统。当我们瞬间推了一下质量块(输入 u \mathbf{u} u x \mathbf{x} x D \mathbf{D} D
什么时候 D \mathbf{D} D
如果我们的系统是一个纯电阻网络,输入一个电压 u u u y y y D \mathbf{D} D y \mathbf{y} y u \mathbf{u} u D \mathbf{D} D
5.2 多输入多输出系统
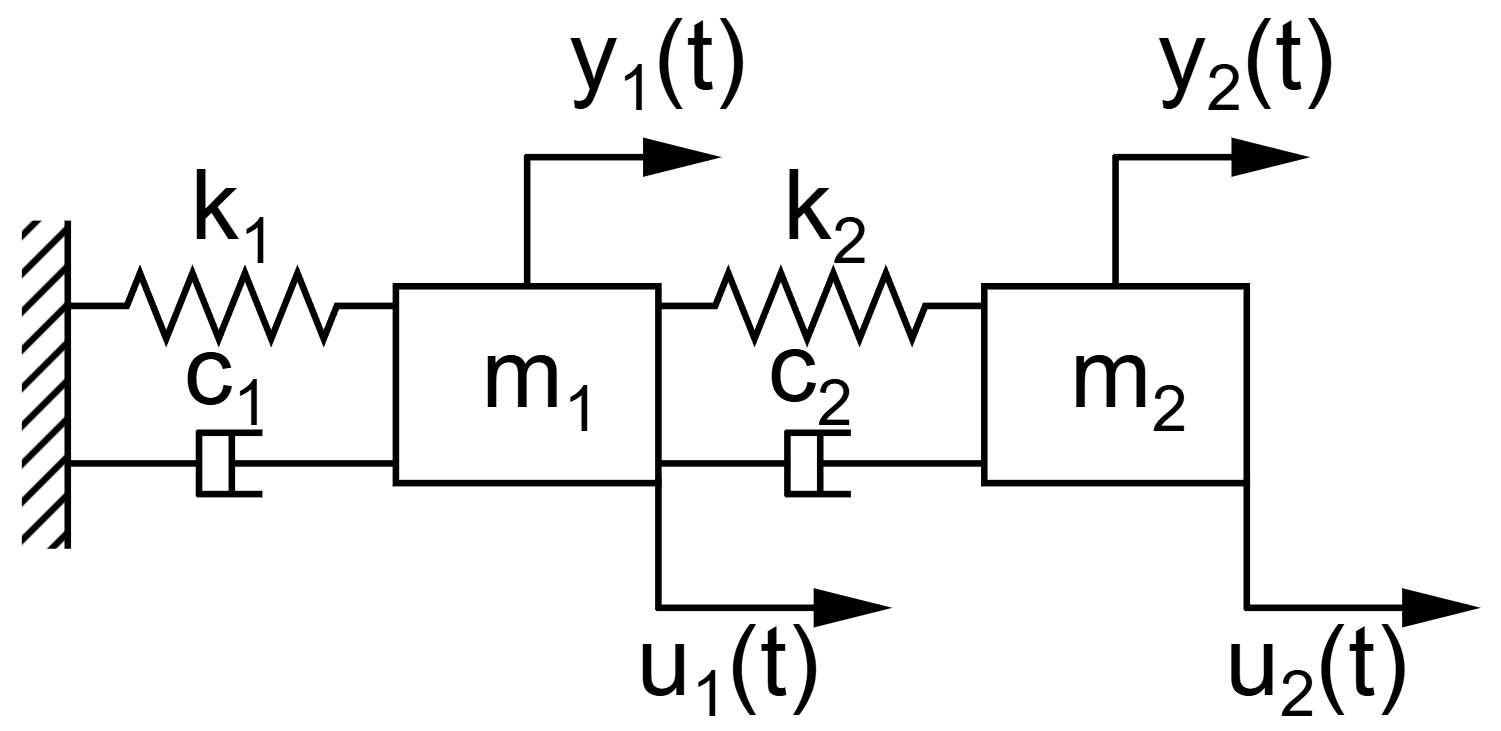
下面我们使用双质量-弹簧-阻尼系统来展示使用状态空间方程处理多输入多输出系统,其系统示意图如图2所示。
图2 双质量-弹簧-阻尼系统示意图
根据牛顿第二定律对两个质量块分别进行受力分析,我们可以得到如下的运动学方程:
方程 1
m 1 y ¨ 1 + ( c 1 + c 2 ) y ˙ 1 + ( k 1 + k 2 ) y 1 − c 2 y ˙ 2 − k 2 y 2 = u 1 m_1\ddot{y}_1 + (c_1 + c_2)\dot{y}_1 + (k_1 + k_2)y_1 \mathbf{\color{red}{- c_2\dot{y}_2 - k_2y_2}} = u_1
m 1 y ¨ 1 + ( c 1 + c 2 ) y ˙ 1 + ( k 1 + k 2 ) y 1 − c 2 y ˙ 2 − k 2 y 2 = u 1
方程 2
m 2 y ¨ 2 + c 2 y ˙ 2 + k 2 y 2 − c 2 y ˙ 1 − k 2 y 1 = u 2 m_2\ddot{y}_2 + c_2\dot{y}_2 + k_2y_2 \mathbf{\color{red}{- c_2\dot{y}_1 - k_2y_1}} = u_2
m 2 y ¨ 2 + c 2 y ˙ 2 + k 2 y 2 − c 2 y ˙ 1 − k 2 y 1 = u 2
注意上面方程中标记出来的部分。在方程 1 中,明明是在算 y 1 y_1 y 1 y 2 y_2 y 2 y ˙ 2 \dot{y}_2 y ˙ 2 y 2 y_2 y 2
对比之下,如果我们使用状态空间方程,我们只需要定义四个状态变量:
x 1 = y 1 x_1 = y_1 x 1 = y 1 x 2 = y ˙ 1 x_2 = \dot{y}_1 x 2 = y ˙ 1 x 3 = y 2 x_3 = y_2 x 3 = y 2 x 4 = y ˙ 2 x_4 = \dot{y}_2 x 4 = y ˙ 2
我们就能把一个二阶耦合方程转化为矩阵运算。
[ x ˙ 1 x ˙ 2 x ˙ 3 x ˙ 4 ] = [ 0 1 0 0 − k 1 + k 2 m 1 − c 1 + c 2 m 1 k 2 m 1 c 2 m 1 0 0 0 1 k 2 m 2 c 2 m 2 − k 2 m 2 − c 2 m 2 ] [ x 1 x 2 x 3 x 4 ] + [ 0 0 1 m 1 0 0 0 0 1 m 2 ] [ u 1 u 2 ] \begin{bmatrix} \dot{x}_1 \\ \dot{x}_2 \\ \dot{x}_3 \\ \dot{x}_4 \end{bmatrix} =
\begin{bmatrix}
0 & 1 & 0 & 0 \\
-\frac{k_1+k_2}{m_1} & -\frac{c_1+c_2}{m_1} & \frac{k_2}{m_1} & \frac{c_2}{m_1} \\
0 & 0 & 0 & 1 \\
\frac{k_2}{m_2} & \frac{c_2}{m_2} & -\frac{k_2}{m_2} & -\frac{c_2}{m_2}
\end{bmatrix}
\begin{bmatrix} x_1 \\ x_2 \\ x_3 \\ x_4 \end{bmatrix} +
\begin{bmatrix} 0 & 0 \\ \frac{1}{m_1} & 0 \\ 0 & 0 \\ 0 & \frac{1}{m_2} \end{bmatrix}
\begin{bmatrix} u_1 \\ u_2 \end{bmatrix} x ˙ 1 x ˙ 2 x ˙ 3 x ˙ 4 = 0 − m 1 k 1 + k 2 0 m 2 k 2 1 − m 1 c 1 + c 2 0 m 2 c 2 0 m 1 k 2 0 − m 2 k 2 0 m 1 c 2 1 − m 2 c 2 x 1 x 2 x 3 x 4 + 0 m 1 1 0 0 0 0 0 m 2 1 [ u 1 u 2 ]
此时方程的形式仍然为 x ˙ = A x + B u \dot{x} = Ax + Bu x ˙ = A x + B u A \mathbf{A} A 2 × 2 2 \times 2 2 × 2 4 × 4 4 \times 4 4 × 4
6 总结
综合上述推导与分析,我们探讨了从高阶常微分方程向状态空间方程过渡的原因,展示如何将一个单输入单输出系统或一个多输入多输出系统的微分方程转换为一个状态空间方程,并尝试通过状态空间方程分析一个系统的内部演化。我们将在之后的文章继续学习状态空间方程的各项特性以及其与传递函数之间的关系。
参考文献
本系列文章主要参考新西兰坎特伯雷大学ENME403-Linear Systems Control and System Identification课程资料。